 22/08/31
22/08/31論文摘要
了解海洋環(huán)境對各種水下任務(wù)至關(guān)重要,如資源的探測和水下結(jié)構(gòu)的檢查,沒有自主水下航行器(AUVs)的介入,這些任務(wù)就無法進(jìn)行。由于機(jī)載電池和數(shù)據(jù)存儲容量不足,?AUVs在執(zhí)行水下探索任務(wù)也會受到限制。水下對接站的出現(xiàn)能夠很好的解決這一問題,它能夠?yàn)樗聶C(jī)器人提供水下充電和數(shù)據(jù)傳輸。然而在動態(tài)海洋環(huán)境中,渾濁和低光條件是阻礙成功對接的關(guān)鍵挑戰(zhàn)。在本文中,研究人員提出了一種基于視覺的引導(dǎo)方法,使用鎖定檢測以減輕濁度的影響,同時屏蔽雜光和噪聲。鎖定檢測方法鎖定位于對接站燈標(biāo)的閃爍頻率,并消除其他頻率無用光的影響。該方法使用兩個固定頻率發(fā)光的信標(biāo),安裝在模擬對接站和一個sCMOS相機(jī)上。概念驗(yàn)證實(shí)驗(yàn)結(jié)果表明,該方法能夠識別不同濁度下的信標(biāo),并能有效地剔除不需要的雜散光,而且不需要對基于視覺的引導(dǎo)算法做單獨(dú)的圖像處理。
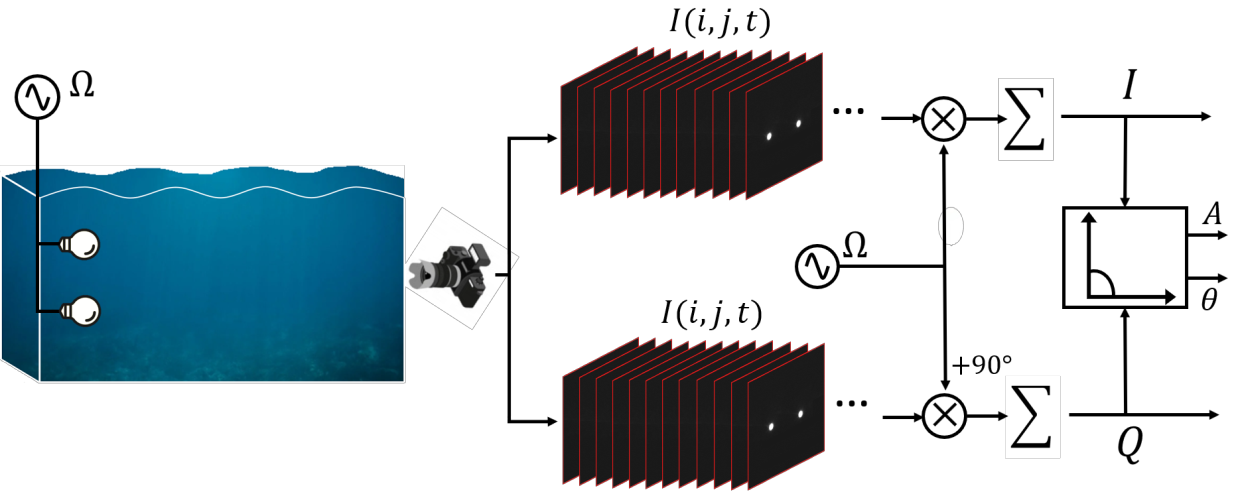
圖.鎖定檢測原理
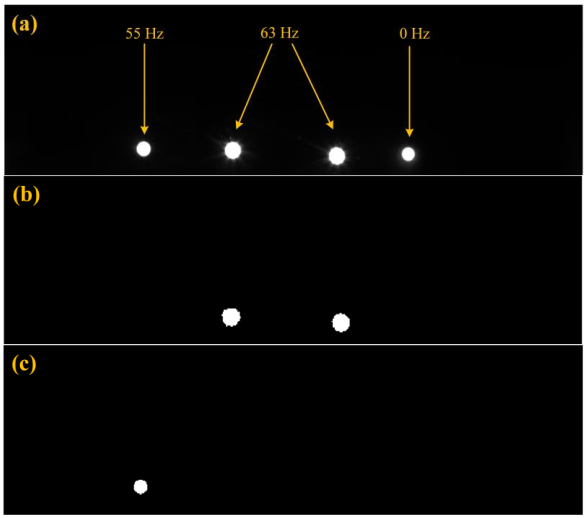
圖.?a)在清澈的水中拍攝的帶有有源光信標(biāo)的原始圖像,調(diào)制頻率為63 Hz,安裝在中間的模擬停靠站上,兩個背景光源發(fā)射頻率為55 Hz和0 Hz。b)將鎖相檢測后的二值化結(jié)果應(yīng)用于63hz。c)將鎖定檢測后的二值化結(jié)果應(yīng)用于55hz。
成像技術(shù)分析
視覺導(dǎo)航技術(shù)配合計(jì)算機(jī)視覺算法能夠在定位精度高、不易被外部探測、可執(zhí)行多任務(wù)等方面優(yōu)于其他導(dǎo)航技術(shù),但在水下環(huán)境中會受到光線的衰減和散射。此外,水下機(jī)器人在深海中吹起的泥漿會造成渾濁,這使得基于視覺方法的適用性更具挑戰(zhàn)性。Dhyana 400BSI相機(jī)供了實(shí)驗(yàn)所需的靈活性,具有高速和高信噪比,能夠在噪聲中提取微弱的信號,配合軟件獲取圖像的拍攝時間序列以實(shí)現(xiàn)lock-in time檢測。
參考源
Amjad R T, Mane M, Amjad A A, et al. Tracking of light beacons in highly turbid water and application to underwater docking[C]//Ocean Sensing and Monitoring XIV. SPIE, 2022, 12118: 90-97.




